Python实现曲线点抽稀算法的示例
作者:spiderpy 发布时间:2023-02-11 02:57:58
本文介绍了Python实现曲线点抽稀算法的示例,分享给大家,具体如下:
目录
何为抽稀
道格拉斯-普克(Douglas-Peuker)算法
垂距限值法
最后
正文
何为抽稀
在处理矢量化数据时,记录中往往会有很多重复数据,对进一步数据处理带来诸多不便。多余的数据一方面浪费了较多的存储空间,另一方面造成所要表达的图形不光滑或不符合标准。因此要通过某种规则,在保证矢量曲线形状不变的情况下, 最大限度地减少数据点个数,这个过程称为抽稀。
通俗的讲就是对曲线进行采样简化,即在曲线上取有限个点,将其变为折线,并且能够在一定程度保持原有形状。比较常用的两种抽稀算法是:道格拉斯-普克(Douglas-Peuker)算法和垂距限值法。
道格拉斯-普克(Douglas-Peuker)算法
Douglas-Peuker算法(DP算法)过程如下:
1、连接曲线首尾两点A、B;
2、依次计算曲线上所有点到A、B两点所在曲线的距离;
3、计算最大距离D,如果D小于阈值threshold,则去掉曲线上出A、B外的所有点;如果D大于阈值threshold,则把曲线以最大距离分割成两段;
4、对所有曲线分段重复1-3步骤,知道所有D均小于阈值。即完成抽稀。
这种算法的抽稀精度与阈值有很大关系,阈值越大,简化程度越大,点减少的越多;反之简化程度越低,点保留的越多,形状也越趋于原曲线。
下面是Python代码实现:
# -*- coding: utf-8 -*-
"""------------------------------------------------- File Name: DouglasPeuker Description : 道格拉斯-普克抽稀算法 Author : J_hao date: 2017/8/16------------------------------------------------- Change Activity: 2017/8/16: 道格拉斯-普克抽稀算法-------------------------------------------------"""
from __future__ import division
from math import sqrt, pow
__author__ = 'J_hao'
THRESHOLD = 0.0001 # 阈值
def point2LineDistance(point_a, point_b, point_c):
""" 计算点a到点b c所在直线的距离 :param point_a: :param point_b: :param point_c: :return: """
# 首先计算b c 所在直线的斜率和截距
if point_b[0] == point_c[0]:
return 9999999
slope = (point_b[1] - point_c[1]) / (point_b[0] - point_c[0])
intercept = point_b[1] - slope * point_b[0]
# 计算点a到b c所在直线的距离
distance = abs(slope * point_a[0] - point_a[1] + intercept) / sqrt(1 + pow(slope, 2))
return distance
class DouglasPeuker(object):
def__init__(self):
self.threshold = THRESHOLD
self.qualify_list = list()
self.disqualify_list = list()
def diluting(self, point_list):
""" 抽稀 :param point_list:二维点列表 :return: """
if len(point_list) < 3:
self.qualify_list.extend(point_list[::-1])
else:
# 找到与收尾两点连线距离最大的点
max_distance_index, max_distance = 0, 0
for index, point in enumerate(point_list):
if index in [0, len(point_list) - 1]:
continue
distance = point2LineDistance(point, point_list[0], point_list[-1])
if distance > max_distance:
max_distance_index = index
max_distance = distance
# 若最大距离小于阈值,则去掉所有中间点。 反之,则将曲线按最大距离点分割
if max_distance < self.threshold:
self.qualify_list.append(point_list[-1])
self.qualify_list.append(point_list[0])
else:
# 将曲线按最大距离的点分割成两段
sequence_a = point_list[:max_distance_index]
sequence_b = point_list[max_distance_index:]
for sequence in [sequence_a, sequence_b]:
if len(sequence) < 3 and sequence == sequence_b:
self.qualify_list.extend(sequence[::-1])
else:
self.disqualify_list.append(sequence)
def main(self, point_list):
self.diluting(point_list)
while len(self.disqualify_list) > 0:
self.diluting(self.disqualify_list.pop())
print self.qualify_list
print len(self.qualify_list)
if __name__ == '__main__':
d = DouglasPeuker()
d.main([[104.066228, 30.644527], [104.066279, 30.643528], [104.066296, 30.642528], [104.066314, 30.641529],
[104.066332, 30.640529], [104.066383, 30.639530], [104.066400, 30.638530], [104.066451, 30.637531],
[104.066468, 30.636532], [104.066518, 30.635533], [104.066535, 30.634533], [104.066586, 30.633534],
[104.066636, 30.632536], [104.066686, 30.631537], [104.066735, 30.630538], [104.066785, 30.629539],
[104.066802, 30.628539], [104.066820, 30.627540], [104.066871, 30.626541], [104.066888, 30.625541],
[104.066906, 30.624541], [104.066924, 30.623541], [104.066942, 30.622542], [104.066960, 30.621542],
[104.067011, 30.620543], [104.066122, 30.620086], [104.065124, 30.620021], [104.064124, 30.620022],
[104.063124, 30.619990], [104.062125, 30.619958], [104.061125, 30.619926], [104.060126, 30.619894],
[104.059126, 30.619895], [104.058127, 30.619928], [104.057518, 30.620722], [104.057625, 30.621716],
[104.057735, 30.622710], [104.057878, 30.623700], [104.057984, 30.624694], [104.058094, 30.625688],
[104.058204, 30.626682], [104.058315, 30.627676], [104.058425, 30.628670], [104.058502, 30.629667],
[104.058518, 30.630667], [104.058503, 30.631667], [104.058521, 30.632666], [104.057664, 30.633182],
[104.056664, 30.633174], [104.055664, 30.633166], [104.054672, 30.633289], [104.053758, 30.633694],
[104.052852, 30.634118], [104.052623, 30.635091], [104.053145, 30.635945], [104.053675, 30.636793],
[104.054200, 30.637643], [104.054756, 30.638475], [104.055295, 30.639317], [104.055843, 30.640153],
[104.056387, 30.640993], [104.056933, 30.641830], [104.057478, 30.642669], [104.058023, 30.643507],
[104.058595, 30.644327], [104.059152, 30.645158], [104.059663, 30.646018], [104.060171, 30.646879],
[104.061170, 30.646855], [104.062168, 30.646781], [104.063167, 30.646823], [104.064167, 30.646814],
[104.065163, 30.646725], [104.066157, 30.646618], [104.066231, 30.645620], [104.066247, 30.644621], ])
垂距限值法
垂距限值法其实和DP算法原理一样,但是垂距限值不是从整体角度考虑,而是依次扫描每一个点,检查是否符合要求。
算法过程如下:
1、以第二个点开始,计算第二个点到前一个点和后一个点所在直线的距离d;
2、如果d大于阈值,则保留第二个点,计算第三个点到第二个点和第四个点所在直线的距离d;若d小于阈值则舍弃第二个点,计算第三个点到第一个点和第四个点所在直线的距离d;
3、依次类推,直线曲线上倒数第二个点。
下面是Python代码实现:
# -*- coding: utf-8 -*-
"""------------------------------------------------- File Name: LimitVerticalDistance Description : 垂距限值抽稀算法 Author : J_hao date: 2017/8/17------------------------------------------------- Change Activity: 2017/8/17:-------------------------------------------------"""
from __future__ import division
from math import sqrt, pow
__author__ = 'J_hao'
THRESHOLD = 0.0001 # 阈值
def point2LineDistance(point_a, point_b, point_c):
""" 计算点a到点b c所在直线的距离 :param point_a: :param point_b: :param point_c: :return: """
# 首先计算b c 所在直线的斜率和截距
if point_b[0] == point_c[0]:
return 9999999
slope = (point_b[1] - point_c[1]) / (point_b[0] - point_c[0])
intercept = point_b[1] - slope * point_b[0]
# 计算点a到b c所在直线的距离
distance = abs(slope * point_a[0] - point_a[1] + intercept) / sqrt(1 + pow(slope, 2))
return distance
class LimitVerticalDistance(object):
def__init__(self):
self.threshold = THRESHOLD
self.qualify_list = list()
def diluting(self, point_list):
""" 抽稀 :param point_list:二维点列表 :return: """
self.qualify_list.append(point_list[0])
check_index = 1
while check_index < len(point_list) - 1:
distance = point2LineDistance(point_list[check_index],
self.qualify_list[-1],
point_list[check_index + 1])
if distance < self.threshold:
check_index += 1
else:
self.qualify_list.append(point_list[check_index])
check_index += 1
return self.qualify_list
if __name__ == '__main__':
l = LimitVerticalDistance()
diluting = l.diluting([[104.066228, 30.644527], [104.066279, 30.643528], [104.066296, 30.642528], [104.066314, 30.641529],
[104.066332, 30.640529], [104.066383, 30.639530], [104.066400, 30.638530], [104.066451, 30.637531],
[104.066468, 30.636532], [104.066518, 30.635533], [104.066535, 30.634533], [104.066586, 30.633534],
[104.066636, 30.632536], [104.066686, 30.631537], [104.066735, 30.630538], [104.066785, 30.629539],
[104.066802, 30.628539], [104.066820, 30.627540], [104.066871, 30.626541], [104.066888, 30.625541],
[104.066906, 30.624541], [104.066924, 30.623541], [104.066942, 30.622542], [104.066960, 30.621542],
[104.067011, 30.620543], [104.066122, 30.620086], [104.065124, 30.620021], [104.064124, 30.620022],
[104.063124, 30.619990], [104.062125, 30.619958], [104.061125, 30.619926], [104.060126, 30.619894],
[104.059126, 30.619895], [104.058127, 30.619928], [104.057518, 30.620722], [104.057625, 30.621716],
[104.057735, 30.622710], [104.057878, 30.623700], [104.057984, 30.624694], [104.058094, 30.625688],
[104.058204, 30.626682], [104.058315, 30.627676], [104.058425, 30.628670], [104.058502, 30.629667],
[104.058518, 30.630667], [104.058503, 30.631667], [104.058521, 30.632666], [104.057664, 30.633182],
[104.056664, 30.633174], [104.055664, 30.633166], [104.054672, 30.633289], [104.053758, 30.633694],
[104.052852, 30.634118], [104.052623, 30.635091], [104.053145, 30.635945], [104.053675, 30.636793],
[104.054200, 30.637643], [104.054756, 30.638475], [104.055295, 30.639317], [104.055843, 30.640153],
[104.056387, 30.640993], [104.056933, 30.641830], [104.057478, 30.642669], [104.058023, 30.643507],
[104.058595, 30.644327], [104.059152, 30.645158], [104.059663, 30.646018], [104.060171, 30.646879],
[104.061170, 30.646855], [104.062168, 30.646781], [104.063167, 30.646823], [104.064167, 30.646814],
[104.065163, 30.646725], [104.066157, 30.646618], [104.066231, 30.645620], [104.066247, 30.644621], ])
print len(diluting)
print(diluting)
最后
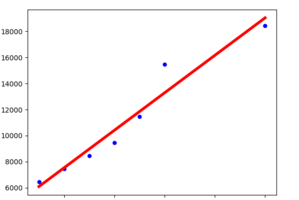
其实DP算法和垂距限值法原理一样,DP算法是从整体上考虑一条完整的曲线,实现时较垂距限值法复杂,但垂距限值法可能会在某些情况下导致局部最优。另外在实际使用中发现采用点到另外两点所在直线距离的方法来判断偏离,在曲线弧度比较大的情况下比较准确。如果在曲线弧度比较小,弯��程度不明显时,这种方法抽稀效果不是很理想,建议使用三点所围成的三角形面积作为判断标准。下面是抽稀效果:


来源:http://www.linuxidc.com/Linux/2017-10/147503.htm
猜你喜欢
 上期回顾:亚马逊购物用户体验分析 (二)方便的导航元素任何网上商店的成功,至关重要的一点,就是用户可以简单轻松地使用导航条。基本店铺分类,用
上期回顾:亚马逊购物用户体验分析 (二)方便的导航元素任何网上商店的成功,至关重要的一点,就是用户可以简单轻松地使用导航条。基本店铺分类,用- 一、引言Windows Communication Foundation(WCF)是Microsoft为构建面向服务的应用程序而提供的统一编
- vue异步更新源码中会有涉及事件循环、宏任务、微任务的概念,所以先了解一下这几个概念。一、事件循环、宏任务、微任务1.事件循环Event L
- 1.官网下载MySQL下载Mysql点击下载mysql. 或点击这里下载下载完成后解压到某一个文件夹(记住这个路径,一会要用到)2.配置初始
- Flask 是一个 Python 实现的 Web 开发微框架。这篇文章是一个讲述如何用它实现传送视频数据流的详细教程。我敢肯定,现在你已经知
- 本文实例讲述了Python简单获取自身外网IP的方法。分享给大家供大家参考,具体如下:#encoding=utf-8#author: wal
- Python装饰器(decorator)在实现的时候,被装饰后的函数其实已经是另外一个函数了(函数名等函数属性会发生改变),为了不影响,Py
- 定义及路由机制定义在settings里面的DATABASES是一个字典,用于定义需要的数据库,如下,一共定义了两个数据库。DATABASES
- 一、柱形图介绍(1)介绍柱状图(Histogram),也称条图(英文:bargraph)、长条图(英文:barchart)、条状图(Bar
- 问题你想使用一个装饰器去包装函数,但是希望返回一个可调用的实例。 你需要让你的装饰器可以同时工作在类定义的内部和外部。解决方案为了将装饰器定
- 一张表(ColumnTable)的结构如下图所示当前需要实现的功能:通过Number的值为67来获取当前的节点ID、父节点ID递归实现SQL
- 环境:numpy,pandas,python3在机器学习和深度学习的过程中,对于处理预测,回归问题,有时候变量是时间,需要进行合适的转换处理
- 一、前言相关知识来自《python算法设计与分析》。初级排序算法是指几种较为基础且容易理解的排序算法。初级排序算法包括插入排序、选择排序和冒
- 简介ping (Packet Internet Groper)是一种因特网包探索器,用于测试网络连接量的程序 。Ping是工作在 TCP/I
- 记录mysql5.7.14安装与配置过程,梳理成文,希望对大家有所帮助。1.配置文档: ####################配
- 用python进行线性回归分析非常方便,有现成的库可以使用比如:numpy.linalog.lstsq例子、scipy.stat
- 很多人一直都有个想法,要是可以随心所欲的操作iframe就好了。这样静态页面也就有了相当于后台动态页面php,jsp,asp中include
- CAS算法(compare and swap)CAS算法是一种有名的无锁算法。无锁编程,即不使用锁的情况下实现多线程之间的变量同步,也就是在
- 缘起最近复习设计模式拜读谭勇德的<<设计模式就该这样学>>该书以java语言演绎了常见设计模式本系列笔记拟采用gol
- Python import .pyd文件时会搜索sys.path列表中的路径运行import xxx.pyd1. 'ImportEr